Takahiro Maeda (前田 孝泰)I am a machine learning researcher at the Research and Development Center, Toshiba Corporation, where I work on vision-language models and AI agents. I earned my PhD at Toyota Technological Institute (TTI) in 2025, advised by Prof. Norimichi Ukita. I also earned my M.Eng. in computer science at TTI in 2021 and B.Eng. in 2019 while working with Norimichi Ukita. My research interests focus on computer vision, human dynamics, robotics, and reinforcement learning to build interactive, coorperative, and assistive agents. I got a Certified Care Worker (介護福祉士) national qualification license on April, 2022. |
|
Research |

|
CacheFlow: Fast Human Motion Prediction by Cached Normalizing FlowTakahiro Maeda, Jinkun Cao, Norimichi Ukita, and Kris Kitani Transactions on Machine Learning Research (TMLR), 2026 arxiv / code / Work done during the research internship at Robotics Institute, Carnegie Mellon University in 2024. |
|
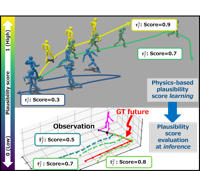
Physical Plausibility-aware Trajectory Prediction via Locomotion EmbodimentHiromu Taketsugu, Takeru Oba, Takahiro Maeda, Shohei Nobuhara, and Norimichi Ukita CVPR, 2025 arxiv / code / website / |

|
Multimodal Active Measurement for Human Mesh Recovery in Close ProximityTakahiro Maeda, Keisuke Takeshita, Norimichi Ukita, and Kazuhito Tanaka IEEE Robotics and Automation Letters (RA-L), 2024 arxiv / video / code / Work done during the internship at Frontier Research Center, Toyota Motor Corporation in 2023. |

|
Fast Inference and Update of Probabilistic Density Estimation on Trajectory PredictionTakahiro Maeda and Norimichi Ukita ICCV, 2023 arxiv / code / |
|
MotionAug: Augmentation with Physical Correction for Human Motion PredictionTakahiro Maeda and Norimichi Ukita CVPR, 2022 arxiv / video / code / IEEE Nagoya Section Conference Presentation Award 2023 |
|
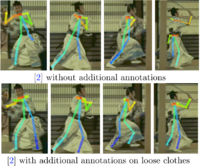
Human Pose Annotation Using a Motion Capture System for Loose-Fitting ClothesTakuya Matsumoto, Kodai Shimosato, Takahiro Maeda, Tatsuya Murakami, Koji Murakoso, Kazuhiko Mino, and Norimichi Ukita IEICE Transactions on Information and Systems 103 (6), 1257-1264, 2020 paper / |

|
Automatic human pose annotation for loose-fitting clothesTakuya Matsumoto, Kodai Shimosato, Takahiro Maeda, Tatsuya Murakami, Koji Murakoso, Kazuhiko Mino, and Norimichi Ukita 16th International Conference on Machine Vision Applications (MVA) Best Poster Award, 2019 paper / |
Other ProjectsThese include unpublished research works and contributed articles. |
|
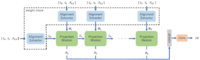
Tutorial on Normalizing Flow and Flow Matching on CV Frontier, Autumn 2024
|
|
NTIRE 2021 Challenge on Burst Super-Resolution: Methods and ResultsTakahiro Maeda and Kazutoshi Akita challenge 2021-07-01 paper / code / The report of 2021 NTIRE Burst Super Resolusion challenge. We won 4th Place. |
|
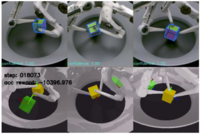
Grasp and Motion Planning for Dexterous Manipulation for the Real Robot ChallengeTakuma Yoneda, Charles Schaff, Takahiro Maeda, and Matthew Walter challenge 2021-01-08 arxiv / paper / code / I participated the 2020 Real Robot Challenge with people at TTI-Chicago. We won the first place. |
Services
|
|
Design and source code from Jon Barron's website |